Het onbemande spoortransportsysteem voor ondergrondse mijnen

Systeem functies
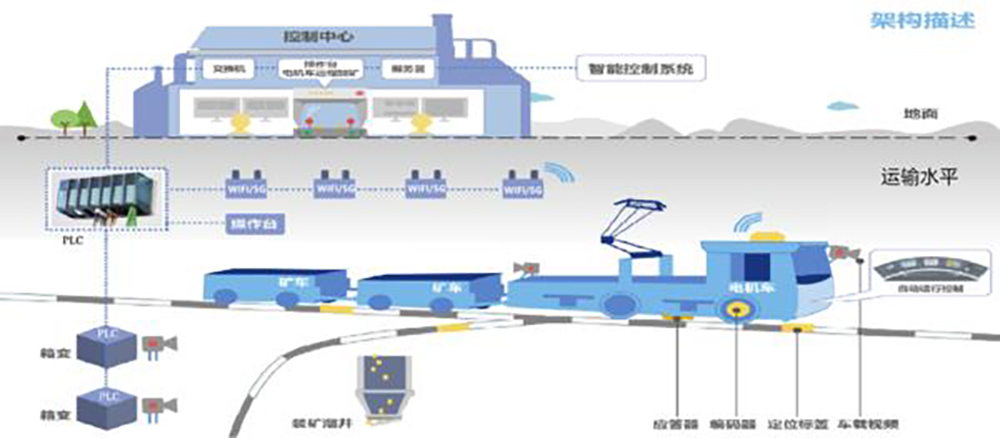
Het zelfrijdende elektrische locomotiefsysteem bestaat uit een automatisch besturingssysteem (ATO), een PLC-besturingseenheid, een precisie-positioneringseenheid, een intelligente afgifte-eenheid, een draadloze communicatienetwerkeenheid, een schakelsignaal gecentraliseerde sluitbesturingseenheid, een videobewaking en video-AI systeem en een controlecentrum.
Korte omschrijving van de functie
Volautomatisch cruisen:volgens de theorie van cruisen met vaste snelheid, volgens de werkelijke situatie en vereisten op elk punt van het transportniveau, is het voertuigcruisemodel geconstrueerd om de autonome aanpassing van de rijsnelheid van de locomotief te realiseren.
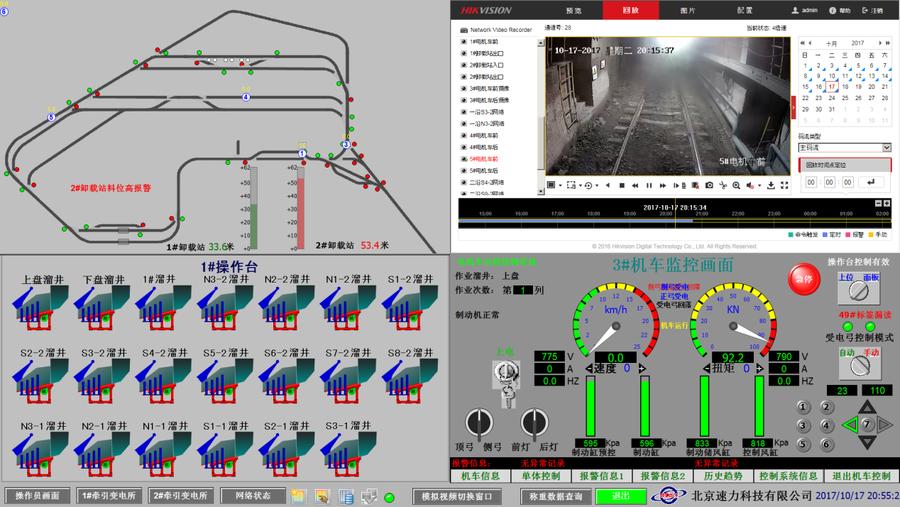
Nauwkeurig positioneringssysteem:nauwkeurige positionering van de locomotief wordt bereikt door middel van communicatietechnologie en bakenherkenningstechnologie, etc., met automatische boegheffing en autonome snelheidsaanpassing.
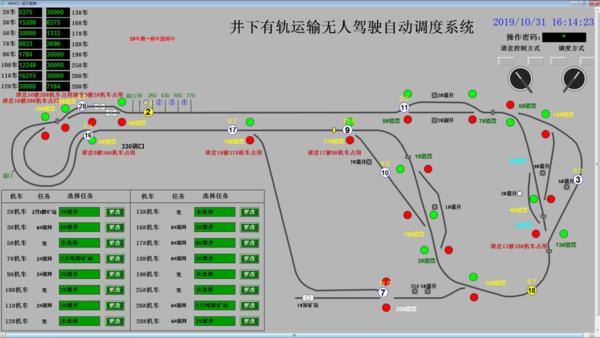
Intelligente verzending:Door het verzamelen van gegevens zoals het materiaalniveau en de helling van elke parachute, en vervolgens op basis van de real-time positie en bedrijfsstatus van elke locomotief, wordt de locomotief automatisch aan het werk toegewezen.
Handmatig laden op afstand:Handmatig laden op afstand kan aan de oppervlakte worden bereikt door de laadapparatuur te bedienen.(Optioneel volautomatisch laadsysteem)
Obstakeldetectie en veiligheidsbescherming:Door een zeer nauwkeurig radarapparaat voor het voertuig toe te voegen om de detectie van mensen, voertuigen en vallende stenen voor het voertuig te bereiken, om de veilige afstand van het voertuig te waarborgen, voltooit het voertuig autonoom een aantal bewerkingen, zoals klinken claxon en remmen.
Functie productiestatistieken:Het systeem voert automatisch een statistische analyse uit van de rijparameters van de locomotief, rijtrajecten, opdrachtlogboeken en productievoltooiing om productielooprapporten te vormen.
Systeem hoogtepunten.
Automatische werking van ondergrondse railtransportsystemen.
Baanbrekend in een nieuwe werkingsmodus voor een zelfrijdende ondergrondse keuzelocomotief.
Realisatie van genetwerkt, digitaal en visueel beheer van ondergrondse railtransportsystemen.

Systeemeffectiviteit Batenanalyse
Onbewaakt ondergronds, productiepatronen optimaliseren.
Het stroomlijnen van het aantal werkende mensen en het verlagen van de arbeidskosten.
Verbetering van de werkomgeving en verbetering van de intrinsieke veiligheid.
Intelligente bedieningsmechanismen voor het managen van verandering.
Economische voordelen.
-Efficiëntie:verhoogde productiviteit met een enkele locomotief.
Stabiele productie door intelligente ertsdistributie.
-Personeel:machinist en mijnenlosser in één.
Eén arbeider kan meerdere locomotieven besturen.
Vermindering van het aantal personeelsleden in posities op het punt van het lossen van de mijn.
-Apparatuur:het verminderen van de kosten van menselijk ingrijpen op apparatuur.
Beheer voordelen.
Analyse van apparatuurgegevens om vooronderhoud van apparatuur mogelijk te maken en kosten voor apparatuurbeheer te verlagen.
Verbeter productiemodellen, optimaliseer de personeelsbezetting en verlaag de kosten voor personeelsbeheer.





